点对边界避障
在轨迹规划中, 有时需要避开复杂形状的边界, 例如道路边缘、建筑物轮廓等. 点对边界的避障功能可以实现点与由多个线段组成的边界之间的避障约束.
建模
下面为点对边界的避障不等式约束的例子:
left_bound = boundary('left_bound', max_dim=50, left_positive=False)
right_bound = boundary('right_bound', max_dim=50, left_positive=True)
ineq_left = point_to_boundary_inequality(left_bound, px, py, distance_to_avoid)
ineq_right = point_to_boundary_inequality(right_bound, px, py, distance_to_avoid)
prob.inequality(ineq_left)
prob.inequality(ineq_right)
首先, 通过boundary接口定义边界, 该接口定义了一个二维边界, 该边界由若干个点组成, 这些点通过线段依次连接形成一条折线, 其入参如下:
name: 边界名称max_dim: 组成该边界的最大点数, 必须为大于等于2的整数left_positive: bool类型, 指定边界左侧是否为正距离区域 (左侧的定义为从边界起点沿着点序列方向的左侧)
信息
- 边界沿着第一段线段的反方向无限延伸
- 边界沿着最后一段线段的方向无限延伸
- 当上述的两条射线相交或者与边界的其他线段相交时, 则停止延伸
注意
- 线段相交时, 可能会导致符号或者距离计算错误
然后, 通过point_to_boundary_inequality接口定义点对边界的避障不等式约束, 其入参如下:
boundary: 通过boundary接口定义的边界px,py: 需要避障的点的坐标, 关于优化变量的表达式distance_to_avoid: 避障距离, 可以为常数, 关于参数的表达式, 或者关于优化变量的表达式
求解
边界的数据都保存在prob结构体中. 在求解前, 需要设置边界数据. 下面为C/C++代码示例:
prob.boundary_left_bound.valid_dim = 6;
prob.boundary_left_bound.x[0] = -5.0; prob.boundary_left_bound.y[0] = -5.0;
prob.boundary_left_bound.x[1] = 5.0; prob.boundary_left_bound.y[1] = -5.0;
prob.boundary_left_bound.x[2] = 5.0; prob.boundary_left_bound.y[2] = 1.0;
prob.boundary_left_bound.x[3] = 15.0; prob.boundary_left_bound.y[3] = 1.0;
prob.boundary_left_bound.x[4] = 25.0; prob.boundary_left_bound.y[4] = -1.0;
prob.boundary_left_bound.x[5] = 35.0; prob.boundary_left_bound.y[5] = -3.0;
prob.boundary_right_bound.valid_dim = 5;
prob.boundary_right_bound.x[0] = -5.0; prob.boundary_right_bound.y[0] = 4.0;
prob.boundary_right_bound.x[1] = 5.0; prob.boundary_right_bound.y[1] = 4.0;
prob.boundary_right_bound.x[2] = 15.0; prob.boundary_right_bound.y[2] = 4.0;
prob.boundary_right_bound.x[3] = 30.0; prob.boundary_right_bound.y[3] = 1.0;
prob.boundary_right_bound.x[4] = 35.0; prob.boundary_right_bound.y[4] = 1.0;
其中, 有以下说明:
left_bound和right_bound为边界的名称, 与建模时定义的名称一致valid_dim为边界的有效点数, 即通过多少个点定义该边界,必须小于等于建模时定义的max_dim且大于等于2x和y为边界上各个点的坐标数组
信息
- 当
valid_dim小于2时, 求解器会返回0距离 - 当
valid_dim大于max_dim时, 求解器会使用max_dim作为有效点数 - 计算量与
valid_dim成正比, 因此建议合并相邻且共线的点以减少valid_dim
效果
下面为利用点对边界的避障功能实现的车辆避障轨迹规划的问题设定:
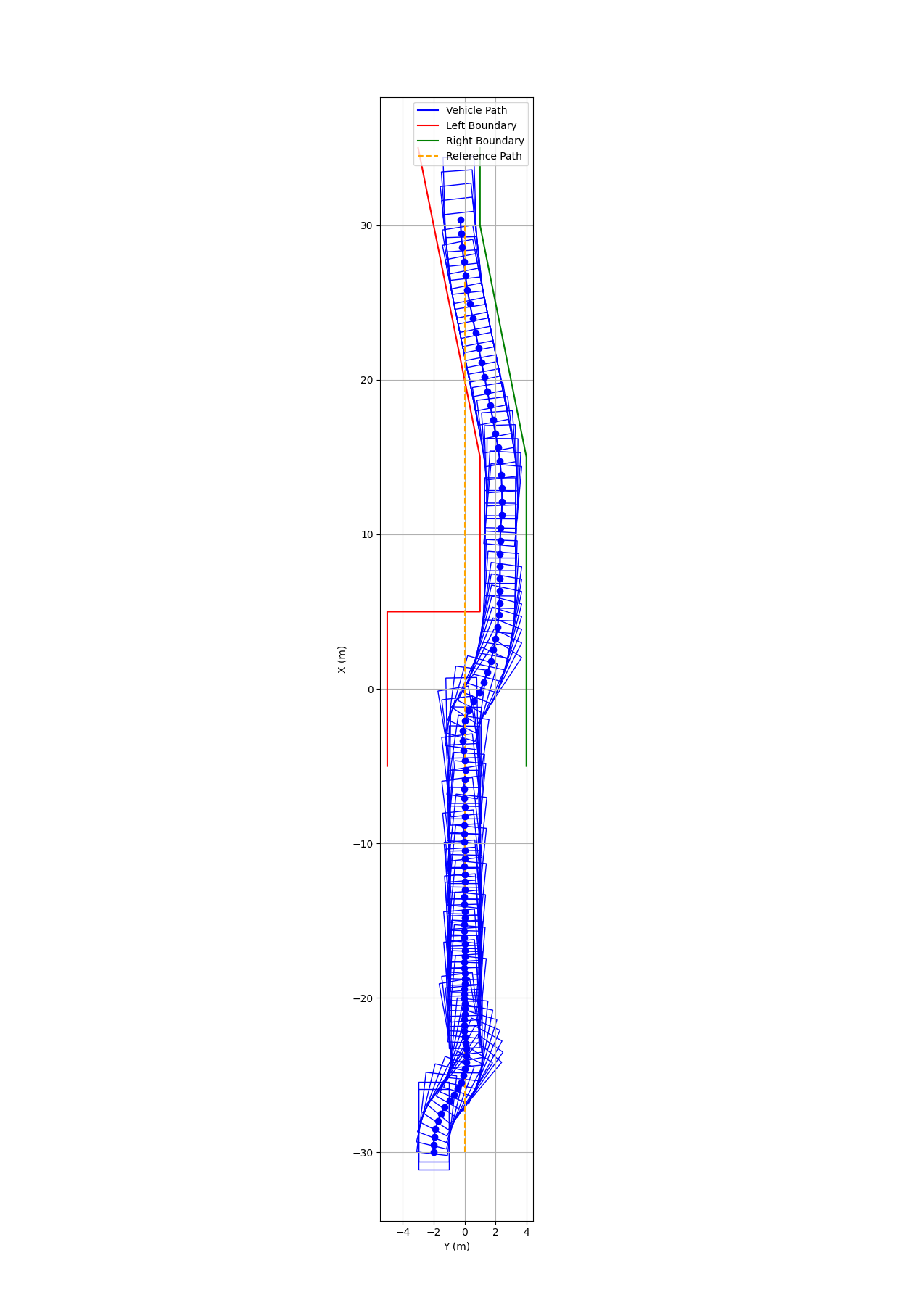
- 车辆起始位置为(-30, 2) m, 目标为跟踪x轴的参考线并且避开左右两侧的边界 (边界值为上述定义的
left_bound和right_bound) - 车辆的优化轨迹为100个stage, 每个stage, 车辆都与两个边界进行避障 (通过车辆不同角点与内部点对边界避障实现), 避障距离为0.3 m
下�面为对边界避障的轨迹规划效果图: