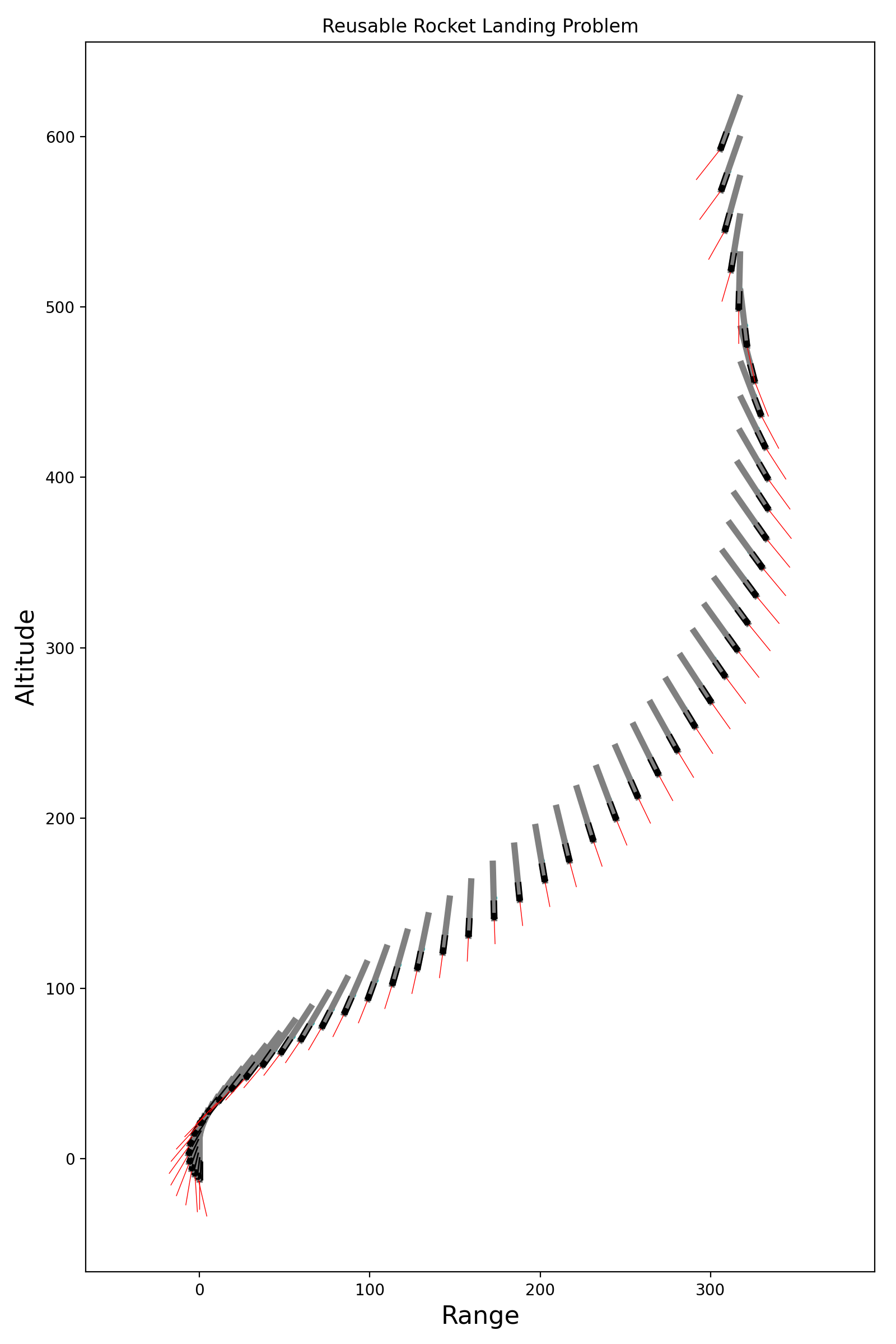
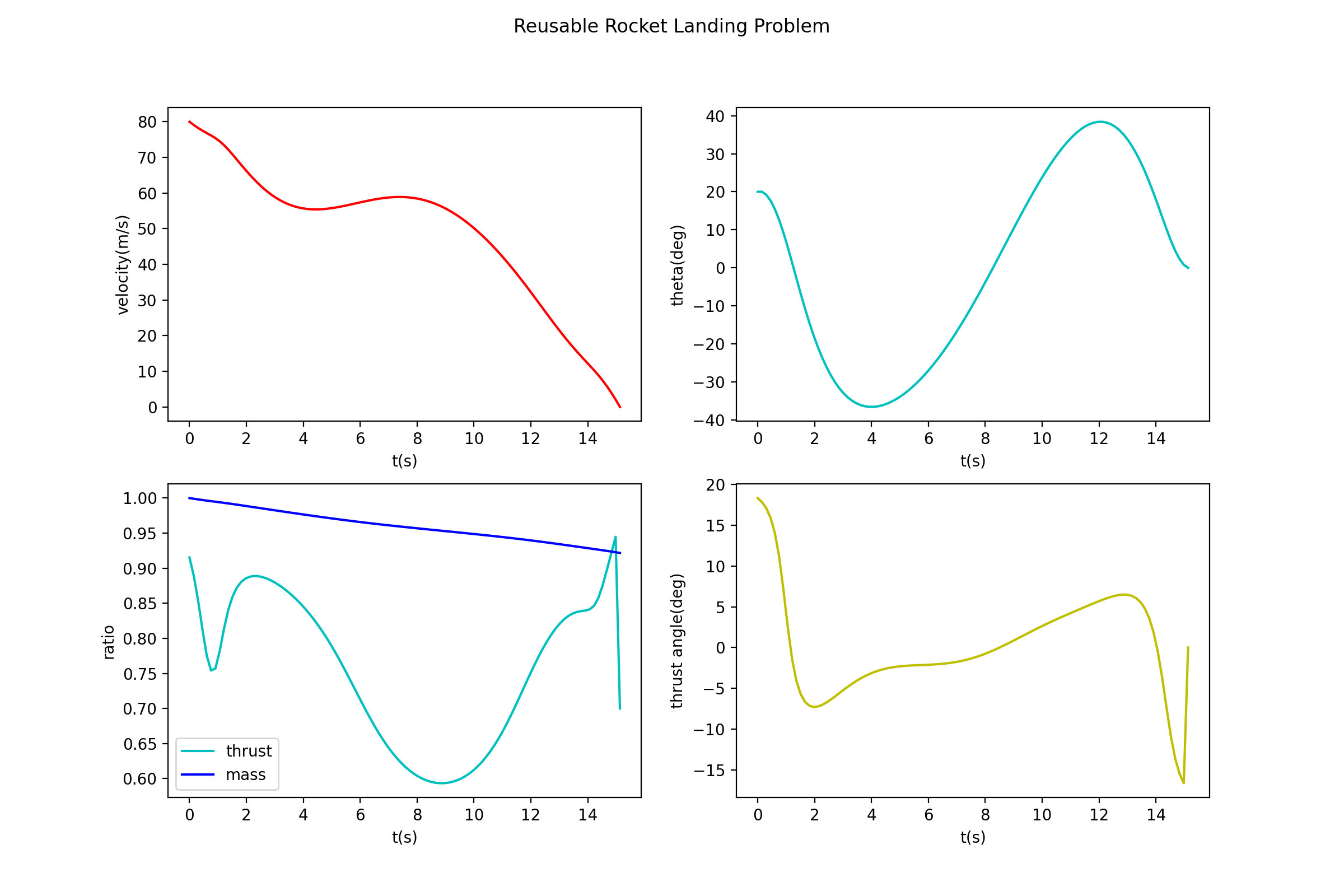
Reusable Rocket Landing Problem
Problem Description
The objective function of starship-like landing problem is defined as the fuel-optimal, and its performance index can be expressed as
Starship-like vehicle dynamics
and are the total aerodynamic drag in the and directions, respectively, described as
The terminal state constraints that satisfy the fixed-point vertical soft landing as follows.
The initial state constraints and the terminal state constraints that satisfy the fixed-point vertical soft landing as follows:
For the control constraints, there are thrust amplitude constraints and engine nozzle swing angle amplitude constraints:
气动参数
| 参数 | , | ||||
|---|---|---|---|---|---|
| 值 | 8.5e4, 1e5 (kg) | 50, 3 | 9.82 | 2.16 | 330 |
| 参数 | |||||
| 值 | 20 | 20.5 | 2.21e6(N) | 1.0 | 0.4 |
对于飞行器而言, 气动系数一般是随着速度、高度等环境因素变化的, OPTIMake将有专门处理 LookupTable�函数支持这类输入, 并实现与求解器的高效集成.
Modeling
NN = 100
prob = multi_stage_problem('starship_full', NN + 1)
m0 = 1e5 # initial mass of rocket (kg)
mdry = 8.5e4 # dry weight of rocket (kg)
x0, y0, theta0, vx0, vy0, dtheta0 = prob.parameters(['x0', 'y0', 'theta0', 'vx0', 'vy0', 'dtheta0'], stage_dependent=False)
x = prob.variable('x')
y = prob.variable('y', hard_lowerbound=0.0)
theta = prob.variable('theta')
vx = prob.variable('vx')
vy = prob.variable('vy')
dtheta = prob.variable('dtheta')
mass = prob.variable('mass', hard_lowerbound=mdry/m0) # normalized mass
tf = prob.variable('tf', hard_lowerbound=0.0, hard_upperbound=50.0)
angle_bound = 20.0 / 180.0 * pi
trust_angle = prob.variable('trust_angle', hard_lowerbound=-angle_bound, hard_upperbound=angle_bound)
trust = prob.variable('trust', hard_lowerbound=0.4, hard_upperbound=1.0)
""" ode """
hs = 7110
rou0 = 1.225
beta = -1 / hs
rou = rou0 * exp(beta * y)
CLD = 2.16 * rou # drag coefficient
Dx = -CLD * vx * sqrt(vx**2 + vy**2) # add 1e-3 to avoid singularity when vx = vy = 0 (backward euler, trapzoid)
Dy = -CLD * vy * sqrt(vx**2 + vy**2)
L = 50 # length of rocket (m)
r = 3 # radius of rocket (m)
g = 9.806 # gravity (m/s^2)
Isp = 330 # specific impulse (s)
I = 1/12*(mass * m0)*(3 * r**2 + L**2) # inertia
max_trust = 2.21e6 # max trust (N)
T = max_trust * trust
Lcg = 20 # center of mass position (m)
Lcp = 22.5 # center of pressure position (m)
MT = -Lcg * T * sin(trust_angle)
MD = -(Lcp - Lcg) * (-Dx * cos(theta) + Dy * sin(theta))
Mz = MT + MD
Fx = T * sin(trust_angle + theta) + Dx
Fy = T * cos(trust_angle + theta) + Dy
dxdt = [vx, vy, dtheta, Fx/(mass * m0), Fy/(mass * m0) - g, Mz/I, -T/(Isp*g*m0), 0]
ts = tf / NN
ode = differential_equation(
state=[x, y, theta, vx, vy, dtheta, mass, tf],
state_dot=dxdt,
stepsize=ts,
discretization_method='forward_euler')
prob.equality(ode)
obj = general_objective(-mass)
# minimize fuel consumption
prob.end_objective(obj)
seq = general_equality([x - x0, y - y0, theta - theta0, vx - vx0, vy - vy0, dtheta - dtheta0, mass - 1])
prob.start_equality(seq)
eeq = general_equality([x - 0, y - 0, theta - 0, vx - 0, vy - 0, dtheta - 0])
prob.end_equality(eeq)
option = codegen_option()
codegen = code_generator()
codegen.codegen(prob, option)
Solution
[1]. Chen, H.; Ma, Z.; Wang, J.; Su, L. Online Trajectory Optimization Method for Large Attitude Flip Vertical Landing of the Starship-like Vehicle. Mathematics 2023, 11, 288.